Recent projects
Best Practice in Robotics (BRICS)
Best Practice in Robotics (BRICS) is a European project with focus on identifying a robot development process. A Model Driven Engineering (MDE) approach for a robot development process is the desired goal. This comprises several subcomponents: hardware, middleware, drivers, algorithms, models and tools that support the MDE approach. BRICS tries to identify best practice solutions in each of these categories, so a robot developer might later choose in his design software the components which are most suitable for a specific application. My work addressed the algorithmic component, to be more precisely: best practice algorithms in 3D perception and modeling.
Vision based robot navigation
I was working in the Fraunhofer Institute for Intelligent Analysis and Information Systems (IAIS) on a new vision system for visual Simultaneous Localization And Mapping (SLAM) applications for mobile robots. It is build up from eleven off-the-shelf USB webcams aiming in different directions. They are mounted in penta-dodecahedron shaped chassis. The goal is to obtain a near full panoramic overview of the environment.
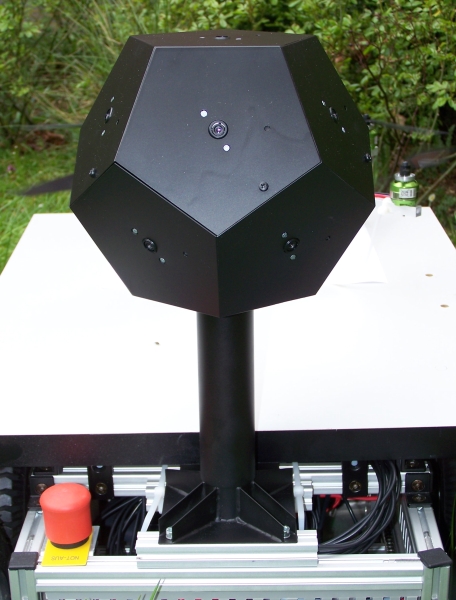 |
| The penta-dodecahedron shaped vision system "spherecam". |
The panoramic vision system is mounted on the VolksBot robot platform, furthermore a continuous rotating laser scanner and a GPS receiver are installed to compare the results for localization. As computational unit serves a MacMini.
 |
| VolksBot platform
equipped with panoramic vision system, continuous laser scanner, GPS and a MacMini. |
See below a video from a dataset:
Former projects
| 2007 | Bachelor thesis at Gesellschaft fuer Netzwerk- und Automatisierungs-Technologie mbH (N.A.T) |
| Task: Optimized implementation of a telecommunication protocol (Voice over IP) on a microcontroller | |
| 2006 | Practical project at Gesellschaft fuer Netzwerk- und Automatisierungs-Technologie mbH (N.A.T) |
| Task: Evaluation and launch of a hardware management middleware software (OpenHPI) | |
| 2003 | VDE/VDI robot competition 2003 |
| Task: Design and programming of an autonomous robot | |
| 2000 | Student practical training at GMD institution |
| Task: Creation of a mail information system |